Samsung SGR-A1
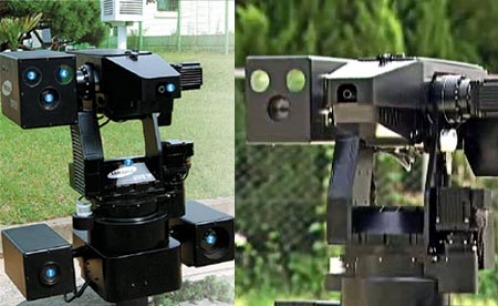
In 2006, Samsung Techwin announced a $200,000, all weather, 5.56 mm robotic machine gun to guard the Korean DMZ. It is capable of tracking multiple moving targets using IR and visible light cameras, and is under the control of a human operator. The Intelligent Surveillance and Guard Robot can "identify and shoot a target automatically from over two miles away." The robot, which was developed by a South Korean university, uses "twin optical and infrared sensors to identify targets from 2.5 miles in daylight and around half that distance at night."
It is also equipped with communication equipment (a microphone and speakers), "so that passwords can be exchanged with human troops." If the person gives the wrong password, the robot can "sound an alarm or fire at the target using rubber bullets or a swivel-mounted K-3 machine gun." South Korea's soldiers in Iraq are "currently using robot sentries to guard home bases."
SYRANO

SYRANO (Système Robotisé d'Acquisition pour la Neutralisation d'Objectifs, "Robotic system for acquisition and neutralisation of targets") is the first operational battlefield robot of the French military.
Robot Cops to Patrol Korean Streets

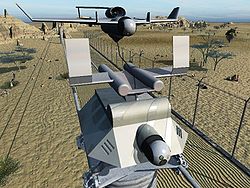
The X-45 model UCAV is designed to fly a 650-mile round-trip mission, loitering perhaps a half-hour over
a target, and drop 3,000 pounds of guided bombs. At $10-$15 million apiece, the
X-45 UCAV, without all the expensive human requirements for life-support systems
and visual instruments, would cost about a third as much as the $45 million JSF.
Dassault Aviation's Dassault nEUROn (French)

This delta wing stealth Unmanned Combat Air Vehicle (UCAV) project is the final phase of the Dassault LOGIDUC 3-step stealth "combat drone" program.
As a UCAV, nEUROn will be significantly larger and more advanced than other well-known UAV systems like the MQ-1 Predator, with ranges, payloads and capabilities that approach those of manned fighter aircraft.
BigDog

BigDog is a dynamically stable quadruped robot created in 2005 by Boston Dynamics with Foster-Miller, the NASA Jet Propulsion Laboratory, and the Harvard University Concord Field Station.
History: BigDog is funded by the Defense Advanced Research Projects Agency in the hopes that it will be able to serve as a robotic pack mule to accompany soldiers in terrain too rough for conventional vehicles. Instead of wheels or treads, BigDog uses four legs for movement, allowing it to move across surfaces that would defeat wheels. The legs contain a variety of sensors, including joint position and ground contact. BigDog also features a laser gyroscope and a stereo vision system.
BigDog is 1 metre (3.3 ft) long, stands 0.7 metres (2.3 ft) tall, and weighs 75 kilograms (170 lb), about the size of a small mule. It is capable of traversing difficult terrain at 5.3 kilometres per hour (3.3 mph), carry 154 kilograms (340 lb) and climb a 35 degree incline. Locomotion is controlled by an onboard computer that receives input from the robot's various sensors. Navigation and balance are also managed by the control system.
BigDog was featured in an episode of Web Junk 20, as well as articles in New Scientist, Popular Science, Popular Mechanics, and The Wall Street Journal.
On March 18, 2008, Boston Dynamics released video footage of a new generation of BigDog. The footage shows BigDog's ability to walk on icy terrain and recover its balance when kicked from the side.
Hardware: Big Dog is powered by a two-stroke, one-cylinder, 15-HP go-kart engine running at 9000 RPM. The engine drives a hydraulic pump, which in turn drives the hydraulic leg actuators. Each leg has four actuators (two for the hip joint, and one each for the knee and ankle joints), for a total of 16. Each actuator unit consists of a hydraulic cylinder, servovalve, position sensor, and force sensor.
Onboard computing power is modest: a ruggedized PC/104 board stack with a Pentium class computer running QNX.
|
|
|
Hull Cleaning Robot

-steve 9-23-09 robots.net
New IED Robot

Other companies have roboticized individual pieces of earth-moving equipment, but until now, no one has created a universal kit that can quickly remotely control any Bobcat SJC-equipped loader used in the rough manner the military requires
Sure, it's great for creating instant, low-cost telerobotics for handling oversized IEDs but we can think of all sorts of cool uses for a full sized robot like this. We're guessing they aren't planning to send us a review unit any time soon though.
-steve 9-9-09 Robots.net
Exoskeletons
Sarcos/Raytheon XOS Exoskeleton arms/legs. For use in the military and to "replace the wheelchair", weighs 150 lbs and allows the wearer to lift 200 lbs little or no effort.
UC Berkeley/Lockheed Martin HULC legs

to carry up to 200 lbs on a backpack attached to the exoskeleton independent of the user.
Cyberdyne's HAL 5 arms/legs

Raytheon Sarcos Exoskeleton

In 2000, DARPA requested design proposals for a powered military exoskeleton. Of the 14 designs submitted, DARPA chose the one submitted by Sarcos. The Sarcos design involves a suit powered by a single engine, including a tank holding 24 hours of fuel, that sits near the wearer's buttocks. The suit gives the wearer increased strength and endurance through servo motors powered by the engine. The finished suit is named the XOS Exoskeleton and weighs 150 pounds (68 kg) Popular Science reported that the XOS gives wearers the ability to lift 200 pounds (91 kg) "repeatedly with minimal strain”. DARPA specifications call for the suit to allow lifting of up to 400 pounds (180 kg), but it is not known whether the XOS meets that criterion.
The army will use initial production models of the XOS for logistics and supply tasks such as repetitive lifting of heavy objects. Future models will have various combat customizations for firing heavy weapons or transporting wounded soldiers.
Honda
Exoskeleton Legs

M.I.T.'s Exoskeleton Legs

legs. Weighs 11.7 kilograms (26 lbs).
Prosthetic Robot Ankle

HARV Brings Gaming Controls to Military Robots
By Mark Wilson*, 9:36 AM on Wed Feb 13 2008, 5,275 views
Gizmodo.com

Tcuav
A Train Cable UAV (TCUAV) is a combination of three concepts: unmanned aerial vehicles (UAVs), unmanned ground vehicles (UGVs), and trains. A Train Cable UAV (TCUAV) consists of an overhead, unmanned "train" carrying and receiving energy from cables installed on dedicated electric towers, and a UAV device which is connected to the train via an electric, energy-transmitting wire.
Small Unmanned Ground Vehicle

The XM1216 Small Unmanned Ground Vehicle (SUGV) is a lightweight, manportable Unmanned Ground Vehicle (UGV) capable of conducting military operations in urban terrain, tunnels, sewers, and caves.
Dragon Runner

Dragon Runner is a military robot built for urban combat. The robot has four wheels, is 15 inches (38 cm) long, less than a foot wide, and 5 inches (13 cm) in height. The robot is very rugged, and can be thrown over fences, up or down stairwells, from a moving vehicle at 45 miles per hour (70 km/h), or even from a third-story window. It doesn't matter how it lands because neither side is the right side up. However, it was not designed to drive up or down stairs on its own.
iRobot Warrior

The iRobot Warrior (also described as the Warrior 700 or X700) is an unmanned robotic platform from iRobot Corporation. The 285 lb (129 kg) robot can traverse land at up to 9.3 mph (15 km/h) and is capable of carrying up to 500 lb (227 kg), including 150 lb (68 kg) in its manipulator. Able to climb steps and slopes at up to 45°, the next generation of remote control robotic vehicles is bigger, faster, and more capable than their smaller counterparts. Initial intended uses are Explosive Ordinance Disposal, route-clearance, surveillance, reconnaissance, casualty extraction, firefighting, manipulating and welding.
Armed Robotic Vehicle (ARV)

XM1219 Armed Robotic Vehicle-Assault-Light (ARV-A-L) based on the MULE Vehicle
R-Gator

Unmanned John Deer Gator.
All-Purpose Remote Transport System (ARTS)

The All-Purpose Remote Transport System is designed to disable explosive devices.
Armored Combat Engineer Robot

Roughly the size of a small bulldozer and weighing 2.25 tons, ACER is among the larger of the terrestrial military robots.
Multifunctional Utility/Logistics and Equipment

The MULE is a 2.5-ton Unmanned Ground Vehicle (UGV) that will support dismounted and air assault operations.
Robotic Armored Assault System (RAAS)

